Publications
Unified Embodied VLM Reasoning with Robotic Action via Autoregressive Discretized Pre-training
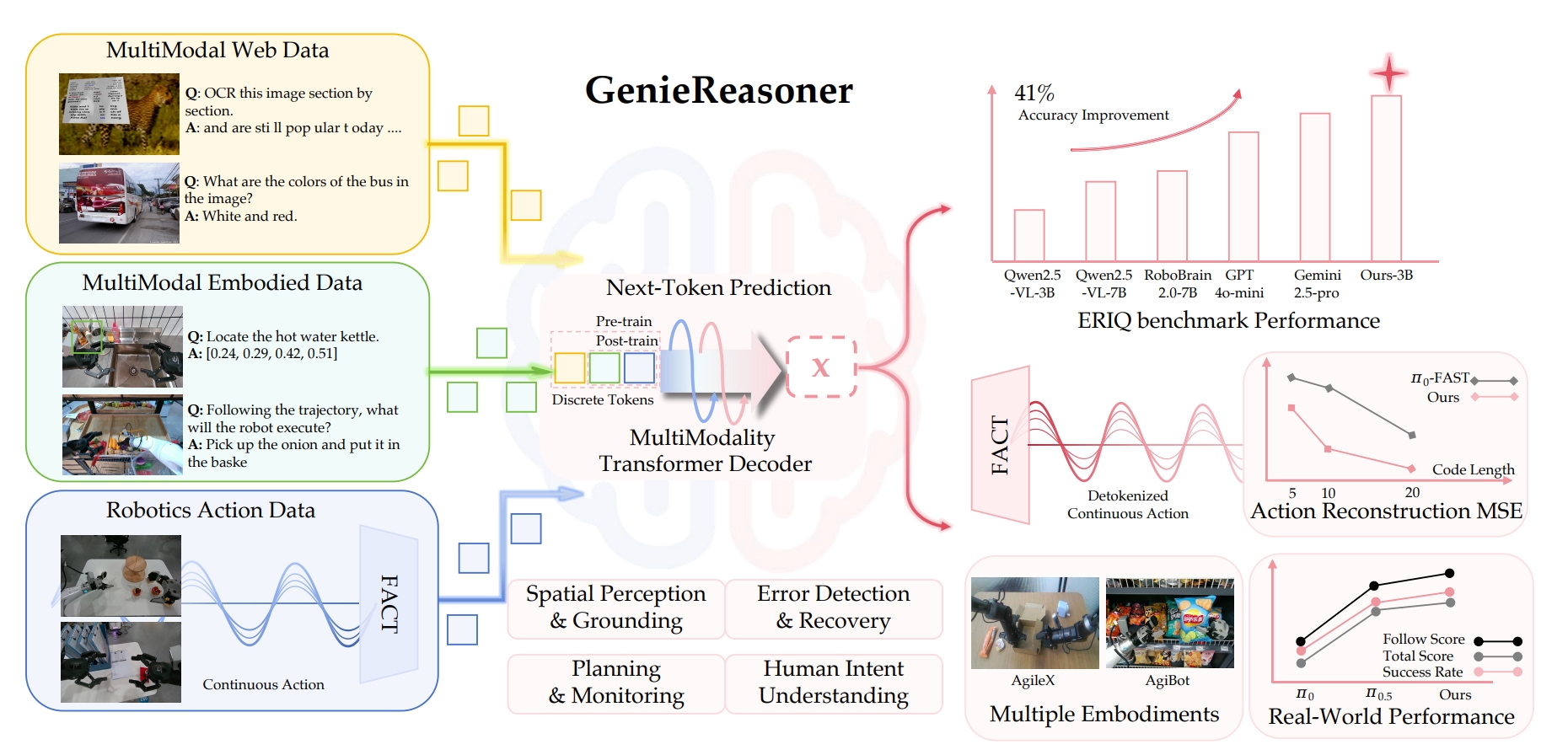
[PDF(coming soon)] [Code(coming soon)]
InternVLA-M1: A Spatially Grounded Foundation Model for Generalist Robot Policy
InternVLA-M1 Contributors
[Code] [Project]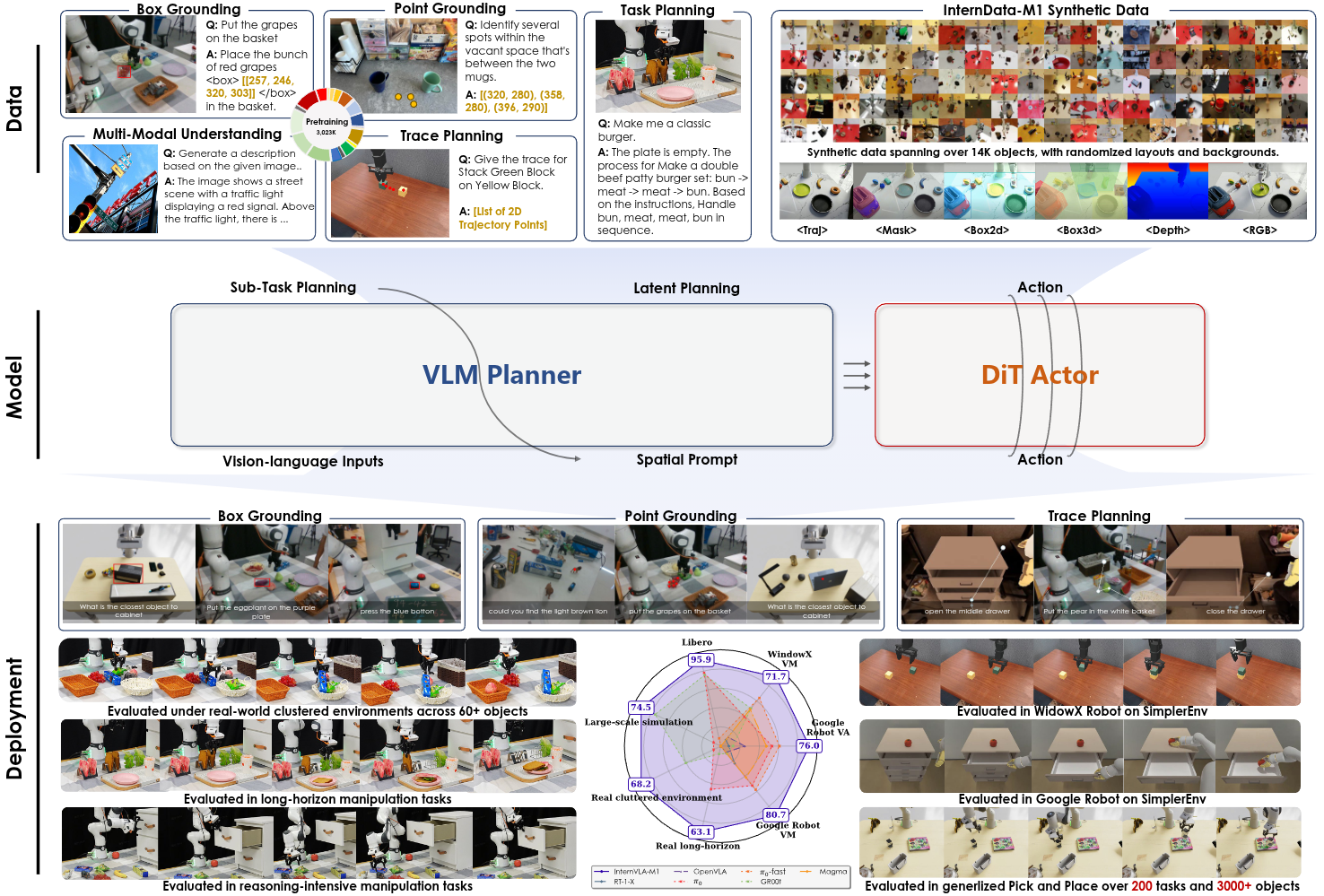
BibTeX
@misc{internvla2024, title = {InternVLA-M1: Latent Spatial Grounding for Instruction-Following Robotic Manipulation}, author = {InternVLA-M1 Contributors}, year = {2025}, booktitle={arXiv}, }Beyond ‘Templates’: Category-Agnostic Object Pose, Size, and Shape Estimation from a Single View Under Review
Jinyu Zhang, Haitao Lin, Jiashu Hou, Xiangyang Xue, Yanwei Fu.
[PDF] [Code(coming soon)]
LAC-Net: Linear-Fusion Attention-Guided Convolutional Network for Accurate Robotic Grasping Under the Occlusion, IROS 2024 (Oral Pitch).
Jinyu Zhang, Yongchong Gu, Jianxiong Gao, Haitao Lin, Qiang Sun, Xinwei Sun, Xiangyang Xue, Yanwei Fu.
[PDF] [Code] [Project]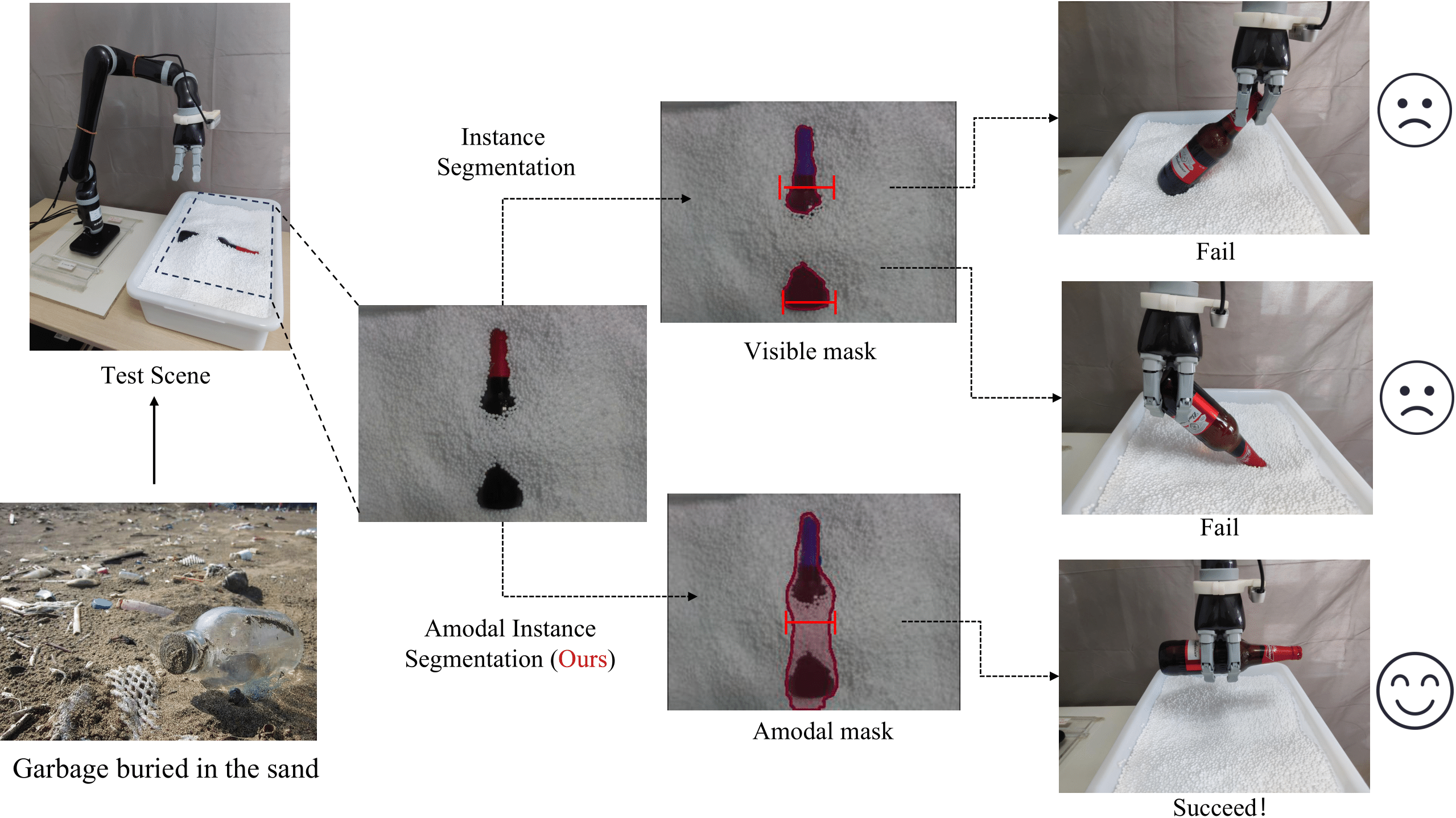
BibTeX
@misc{zhang2024lacnetlinearfusionattentionguidedconvolutional, title={LAC-Net: Linear-Fusion Attention-Guided Convolutional Network for Accurate Robotic Grasping Under the Occlusion}, author={Jinyu Zhang and Yongchong Gu and Jianxiong Gao and Haitao Lin and Qiang Sun and Xinwei Sun and Xiangyang Xue and Yanwei Fu}, year={2024}, eprint={2408.03238}, archivePrefix={arXiv}, primaryClass={cs.RO}, url={https://arxiv.org/abs/2408.03238}, }
Open-Source Contributions
InternManip — Contributor & Maintainer
A unified framework for robotic training and evaluation.
GitHub RepoInternData-M1 dataset — Core Contributor
A large-scale embodied robotics dataset (~250k simulated demonstrations) with rich annotations, including 2D/3D boxes, trajectories, grasp points, and semantic masks.
Hugging FaceInternData-M1 — Core Contributor
A Spatially Grounded Foundation Model for Generalist Robot Policy.
Github RepoIROS 2025 Challenge Organization — Contributor & Maintainer
Core contributor of the IROS 2025 Challenge on Dual-Arm Manipulation, featuring 10 carefully designed scenarios with diverse tasks, assessing multi-scale robotic capabilities.
Dataset can be accessed from here, welcome to participate! Hugging Face